
FS600 series servo system is the latest general-purpose AC servo system developed with advanced semi-closed-loop vector control algorithm and high-precision bus encoder combined with market demand. The power covers 0.1KW to 3KW. It is a general-purpose system suitable for various industrial automation processing industry applications. It can realize precise digital control modes such as speed, torque, position and hybrid control. The use of intelligent power modules (DSP + FPGA + IPM) and other latest technology design, simple operation, high reliability, small size, easy to install. High-precision 17bit bus encoder, high response five pairs of pole permanent magnet synchronous motors, 9 DI inputs and 6 digital output programmable digital I / O ports, 400W-3KW novel large, medium and small shells are designed on the outer shell , FS600 has mature servo technology and the highest cost performance, to provide the best service and servo technology solutions for market applications and customers.
● Automotive manufacturing
● Industrial assemble/handling robot
● Automatic filling production line
● CNC machine tool industry
● Precision engraving and milling machine industry
● Metal tube sheet cutting equipment
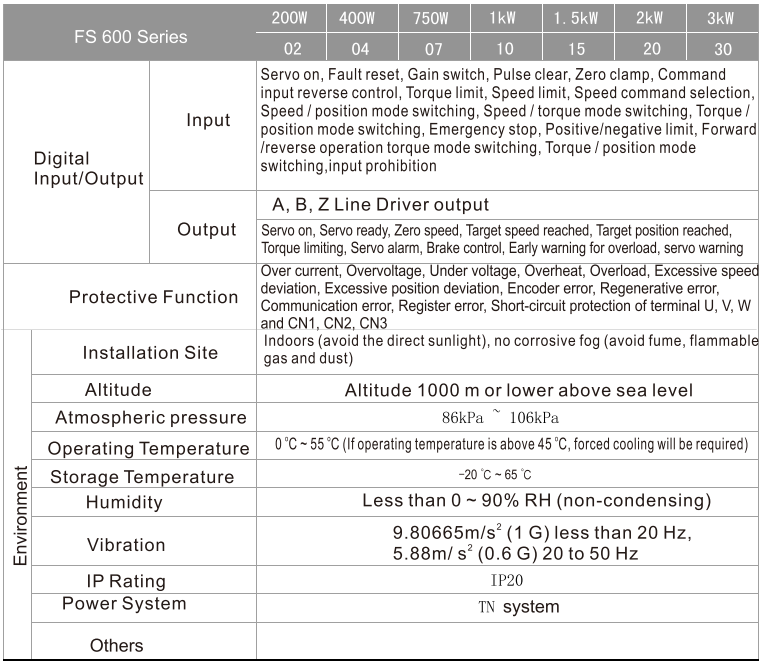
◆ 9 DI terminal input
The input and output terminals are optically isolated and programmable, and the input terminals can realize servo enable, alarm clear,
torque limit and emergency stop, gain switching, torque limit, speed limit, speed selection, control mode switching, emergency stop,
positive and negative Rotation prohibition, electronic gear ratio selection and other functions.
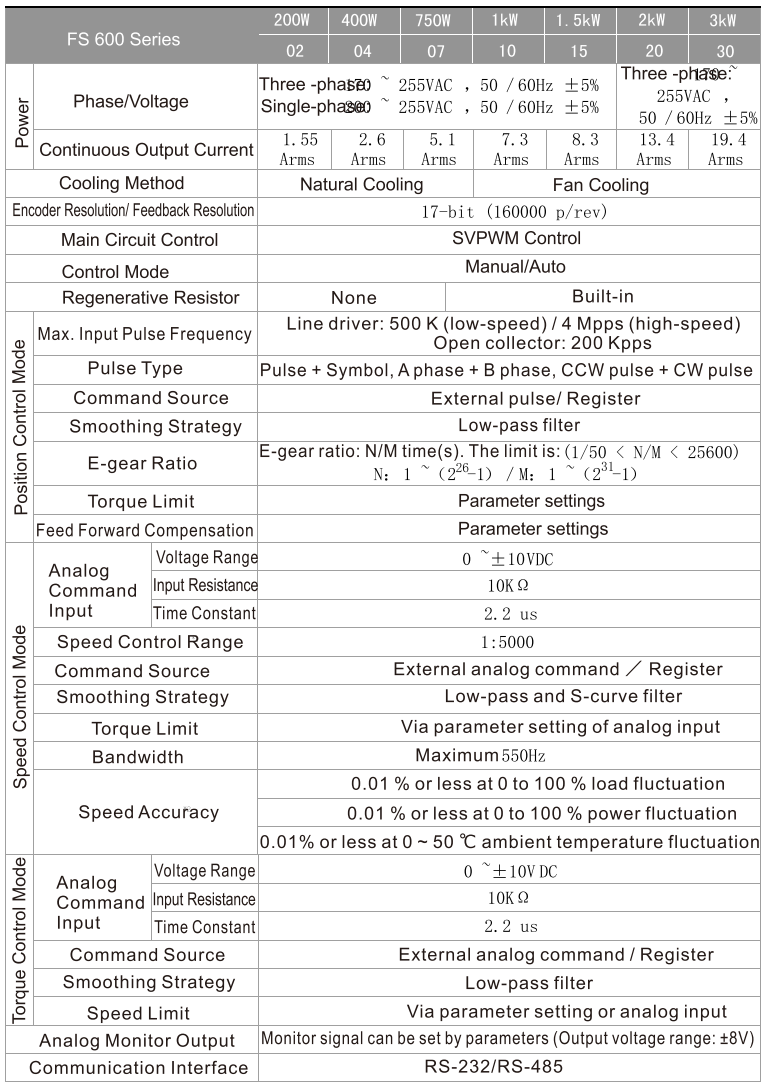
◆ 2 analog command control
Can realize speed control and torque control. Range -10V-0- + 10V, impedance 10K, time constant 2.2us
Using SVPWM control, the system is more efficient and stable
◆ 6 DO output terminals
Darlington optocoupler output, can be directly connected to 50mA load, functions are servo ready, zero speed detection, target speed
reached, torque limit, servo alarm, electromagnetic brake, overload, positioning completion, braking abnormality, communication
abnormality Wait.
◆ Control mode
External analog speed mode, internal register command speed mode, external analog torque control and internal torque command
mode, external pulse sequence position control mode and speed and position mixed control mode (D1 terminal switching), torque and
position control mode (DI terminal Switching) and terminal switching of mixed speed and torque control mode (DI).
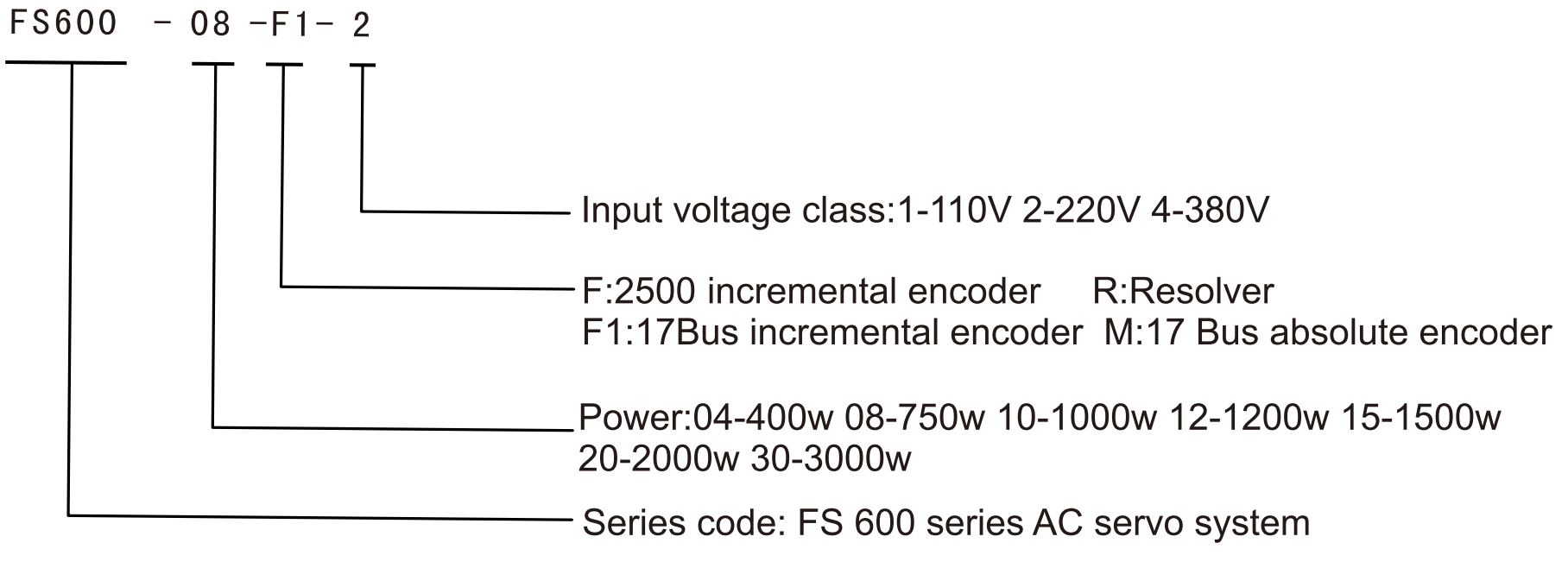
◆ High-precision bus encoder
17bit bus encoder, resolution is 160000p / rev
◆ Strong overload capacity
Torque up to 3 times rated load
◆ Protective function
Complete error detection and identification of over voltage, over current, overload, over speed, and encoder abnormality improves the
system's safety performance
◆ Environmental adaptability
0-55 ℃, when the installation environment exceeds 45 ℃, the space cooling humidity must be 0-90% without condensation
◆ Command pulse input method
Pulse + direction, A phase + B phase; CCW pulse + CW pulse
◆ IP rating: IP20
◆ The feed forward compensation parameter set and command low-pass filter compensation greatly improve the precise control
characteristics of the system
◆ Encoder A/B/Z signal frequency division differential (line driver) output and Z signal open circuit output function
◆ High dynamic response
The bandwidth of the speed loop can reach 550HZ, and the speed change of the sudden load is small
◆ Simulation monitoring output
Parameter editable monitoring signal output (0 ~ + -8V)
◆ Communication interface
RS232/RS485 interface, to meet the convenience of on-site PC debugging and the rapid response characteristics of centralized control
◆ Electronic gear ratio
N/M times, the limiting condition is (1/50<N/M<25600), N:1~(2-1) /M:1~ 2 "-1)
◆ External power supply
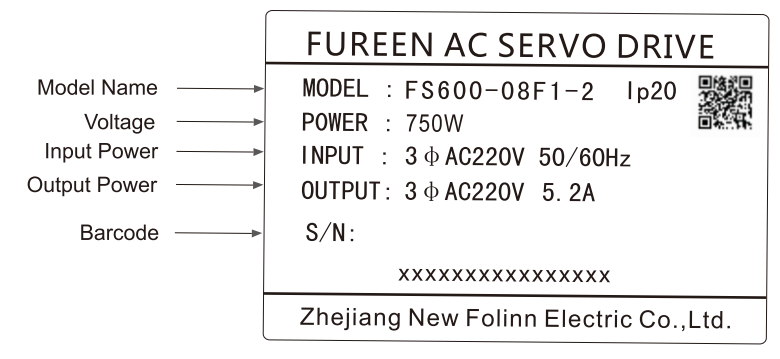
AC50/60Hz+5% Three-phase/single-phase 220v+15%,AC50/60Hz+5%
◆ Speed control range: 1:5000
◆ Internal register position command/speed command/torque command setting
◆ The external pulse differential input is independent of the open collector input. The maximum high-speed differential is 4M, the low
speed is 500K, and the open collector is 200kpps.






Email: overseas@chinafuling.com




